
What if we could enable people to teach their robots how to do what they want the robots to do in the way that they want the robots to do them? Making robots teachable by end-users (as opposed to only roboticists) has been a long-time aspiration of human-robot interaction research. Recent advances in machine learning have revealed new possibilities for improving robot teachability.
I have had the incredible luck to get to collaborate with some of the world’s best HRI and ML researchers on this challenge, including Maya Cakmak, Dorsa Sadigh, and the research team at Google DeepMind Robotics.
My publications in this area include:
Mahadevan, K., Chien, J., Brown, N., Xu, Z., Parada, C., Xia, F., Zeng, A., Takayama, L., & Sadigh, D. (2024). Generative expressive robot behaviors using large language models. Proceedings of Human-Robot Interaction, HRI 2024, 482-491. [Best paper – technical track]
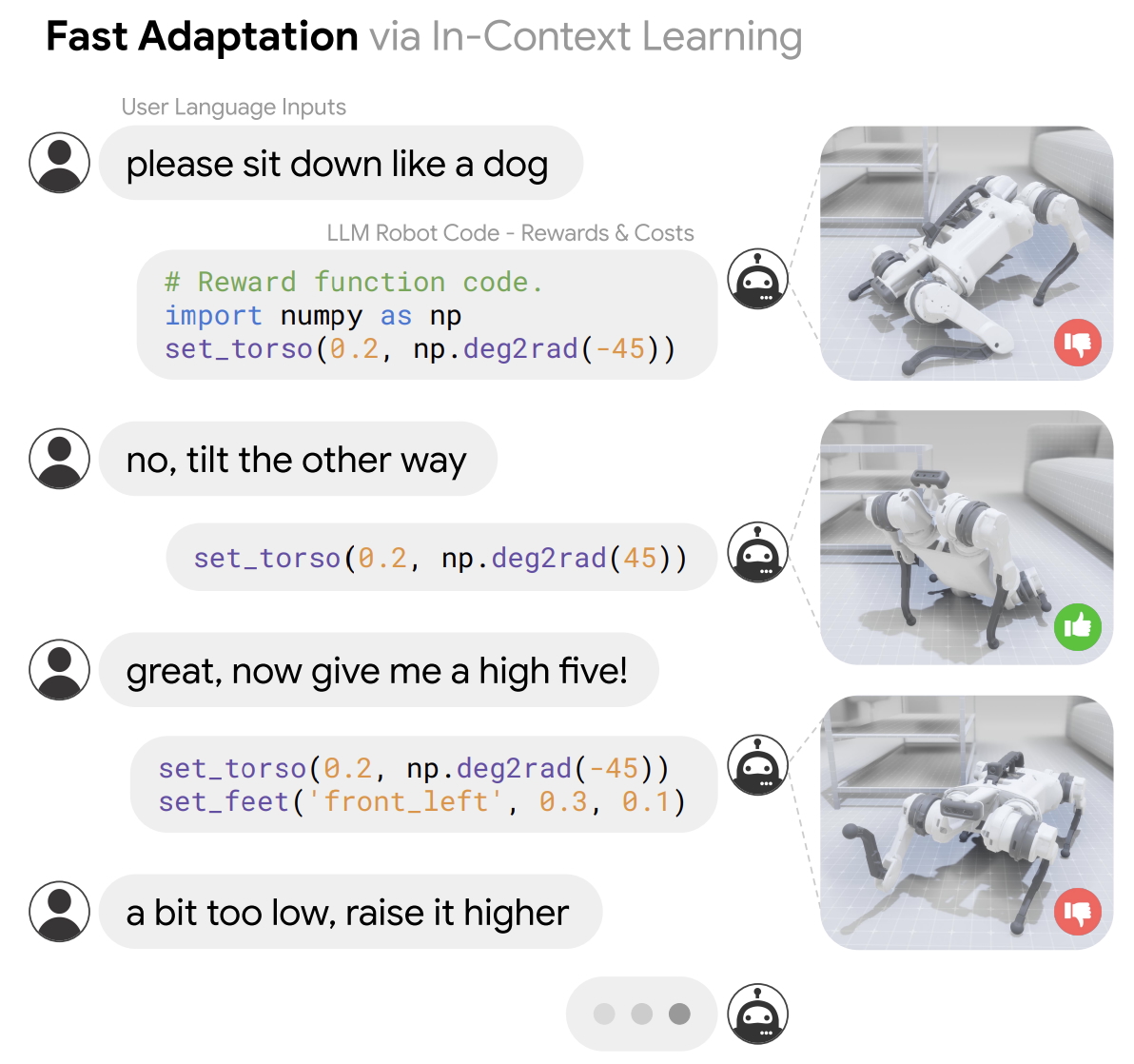
Liang, J., Xia, F., Yu, W., Zeng, A., Attarian, M., Villalonga, M. B., Bennice, M., Bewley, A., Dostmohamed, A., Fu, C., Gileadi, N., Giustina, M., Gopalakrishnan, K., Hasenclever , L.., Humplik, J., Hsu, J., Joshi, N. J., Jyenis, B., Kew, J. C., Kirmani, S., Lee., T., E., Lee, K., Michaely, A. H., Moore, J., Oslund, K., Rao, D., Ren, A. Z., Tabanpour, B., Vuong, Q., Wahid, A., Xiao, T., Xu, Y., Zhuang, V., Xu, P., Frey, E., Caluwaerts, K., Zhang, T., Ichter, B., Tompson, J., Takayama, L., Vanhoucke, V., Shafran, I., Matarić, M., Sadish, D., Heess, N., Rao, K., Stewart, N., Tan, J., & Parada, C. (2024). Learning to Learn Faster from Human Feedback with Language Model Predictive Control. Proceedings of Robotics Science and Systems (RSS).
Francis, A. G., Parada, C., Kalashnikov, D., Lee, E., Fei, X., Varley, J., Tan, J., Choromanski, K. M., Takayama, L., Persson, M., Xu, P., Tu, S., Singh, S., Zhang, T., Sindhwan, V., & Xiao, X. (2022). Learning model predictive controllers with real-time attention for real-world navigation. Proceedings of CORL 2022.
Chung, M. J.-Y., Huang, J., Takayama, L., Lau, T. & Cakmak, M. (2016). Iterative design of a system for programming socially interactive service robots. Proceedings of the International Conference on Social Robotics: ICSR 2016.
Alexandrova, S., Cakmak, M., Hsiao, K., & Takayama, L. (2014). Robot programming by demonstration with interactive action visualizations. Proceedings of Robotics Science and Systems: RSS 2014, Berkeley, California.
Cakmak, M. & Takayama, L. (2014). Teaching people how to teach robots: The effect of instructional materials and dialog design. Proceedings of Human-Robot Interaction: HRI 2014, Bielefeld, Germany, 431-438. [24% acceptance rate]
[ PDF ]
Goodfellow, I., Koenig, N., Muja, M., Pantofaru, C., & Takayama, L. (2010). Help me help you: Interfaces for personal robots. Late breaking results of Human-Robot Interaction: HRI 2010, Osaka, JP, 187-188.